A Prototype Robotic Ground-based Cal/Val System
March 29, 2024 10:24 AM

Robotic Ground-based Cal/Val System (RGCVS)
© Xi Shao
by Xi Shao, Sirish Uprety, Tung-chang Liu, and Xin Jing
Summary:
Calibration and validation (Cal/Val) of low Earth orbit (LEO) and geostationary (GEO) imaging sensors are essential to ensure radiometric accuracy, stability, and consistency of Sensor Data Records (SDRs), meeting the stringent data quality requirements, and the production of high-quality environmental data products. Post-launch radiometric validation using in-situ measurements through ground-based field campaigns are important to establish the SI (Système International) traceability of Reflective Solar Band (RSB) calibration.
This project augments laboratory and ground-based calibration/validation instrumentation and capabilities of CISESS Remote Sensing Laboratory (RSL). Under the initiative of building Robotic Ground-based Cal/Val System (RGCVS) system supported by the seed grant, we developed Robotic Hyperspectral Ground Bi-directional Reflectance Distribution Function (BRDF) (RHG-BRDF) measurement system. The RHG-BRDF system provides standalone and automated hyperspectral characterization of ground calibration site BRDF. Initial demonstration field experiments with participation of intern students and NOAA sensor calibration team were carried out. The field campaign activities foster broader scope of collaboration and engagement between UMD/CISESS team and NOAA sensor calibration team. In addition, we contributed to the development of a portable Differential Optical Absorption Spectroscopy (DOAS) in collaboration with the NOAA/STAR National Calibration Center (NCC) laboratory for ground-based atmospheric trace gas and aerosol measurements. The ability to assess the SI-traceability of sensor calibration enabled by the seed grant is particularly important for ensuring the SDR data quality of current NOAA LEO and GEO sensors such as VIIRS and ABI. These instruments, developed for field campaigns, will also significantly enhance our knowledge, skills, and capabilities to support future GeoXO, as well as TROPOMI, TEMPO, and other critical missions. This project fosters future projects and collaboration opportunities to enable the transition of the instruments from research to operations and provide post-launch absolute radiometric Cal/Val capabilities for NOAA’s new generation of satellite imagers, including spectrometers on both low Earth orbiting and geostationary orbits.
Accomplishments
1. Design, Development, and Integration of Robotic Hyperspectral Ground BRDF (RHG-BRDF) Measurement System
Bi-directional Reflectance Distribution Function (BRDF) characterization of calibration site is critical for calibrating GEO/LEO instrument observations with large view angle differences. The Robotic Hyperspectral Ground BRDF (RHG-BRDF) system we developed employs rapid scan and data acquisition technology to enable automated hyperspectral BRDF characterization of the calibration site. We carried out the research and development work on defining RHG-BRDF system requirements, system design, hardware components acquisition, system integration, and software development, The RHG-BRDF suite includes Raspberry Pi, hyperspectral OceanInsight spectrometer, 4-Axis robotic arm in r, φ, z (cylindrical coordinate) and θ (scanning) directions, storage media, portable battery, base frame and enclosure (Figure 1). The Python-based integration software was developed on Raspberry Pi microcomputer to handle data acquisition process and integrate/control robotic arms and OceanInsight spectrometer. The RHG-BRDF system enables collection of hyperspectral radiometric data at pre-scheduled times or can be remotely controlled through apps on cell phone sharing the same Wi-Fi. The robotic arm-based platform is designed and developed to enable rapid surface BRDF characterization with automatic angular sweeping in azimuthal and zenith angle directions. The data acquisition, i.e., angular dependent hyperspectral measurements, are saved in hdf5 files. Figure 2 shows the integration of RHG-BRDF system in the lab. Figure 3 shows the robotic scanning along the azimuthal and zenith angle directions realized with the 4-Axis robotic arms.
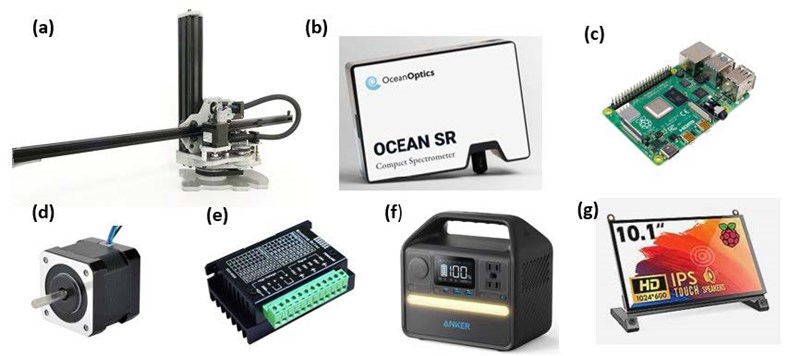
Figure 1: Major components of RHG-BRDF system: (a) 3-axis robotic arm; (b) Ocean Insight hyperspectral spectrometer; (c) Raspberry Pi 4B; (d) NEMA 17 motor (providing additional dimension of rotation); (e) Motor driver; (f) Portable battery; (g) Display for Raspberry Pi.
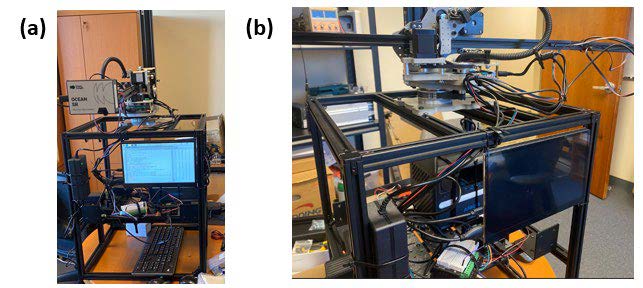
Figure 2: Integration of RHG-BRDF system in lab.
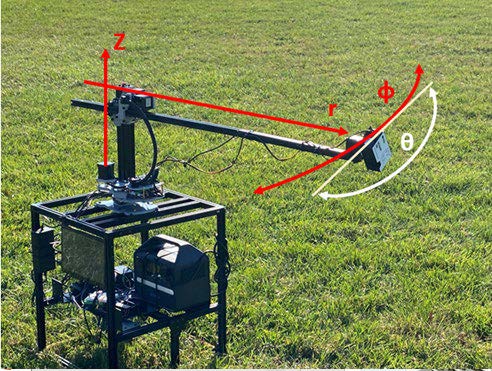
Figure 3: Design of robotic 4-axis (r, φ, z (cylindrical coordinate) and θ (scanning direction)) hyperspectral surface BRDF measurement system.
2. Laboratory and Field Measurement Activities
A series of lab and field measurements with participations of intern students were carried out. These lab and field measurement activities provide student training opportunities in various fields such as instrument test, lab data acquisition/analysis, software development, sensor calibration, field campaign tests, ground-based data collection and analysis.
2.1 Participating NOAA Lapenta Intern project in collaboration with NOAA/STAR NCC laboratory
Brianna Hauke, a NOAA Lapenta intern under the supervision of Dr.Changyong Cao of NOAA/STAR, worked on the intern project “Hyperspectral Sensing of Atmosphere and
Water for a New Generation of Satellite Instrument Observations ”. We participated ground-based hyperspectral spectrometer calibration and field measurements (Figure 4) under this project. The intern compared field measurements of solar spectral irradiance with Thuillier and TSIS-3 top of atmosphere reference standard. She also compared field measurement of hyperspectral reflectance with TROPOMI satellite-based measurements.
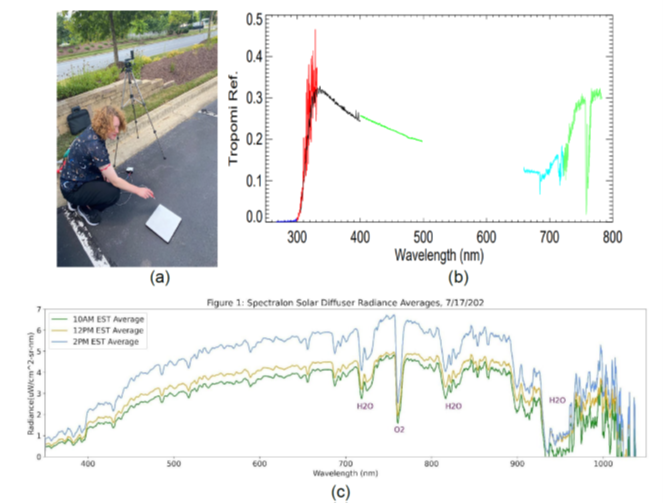
Figure 4: (a) NOAA Lapenta intern working on reflectance calibration with the solar diffuser in the field. (b) Comparison of field measurement of hyperspectral reflectance with TROPOMI measurements (red line vs. black line). (c) Field measurements of solar spectral irradiance and compared with Thuillier and TSIS-3 top of atmosphere reference standard.
2.2 CISESS Summer Intern Project: Calibration of Hyperspectral Radiometer and Field Measurements
This CISESS summer intern project is to train the intern student to operate optical spectrometer to collect reflectance data using a certified reflectance standard, i.e., solar diffuser, analyze reflectance data across different natural and man-made samples, and identify sources of error during laboratory and field measurements. This project also prepares for hyperspectral field measurements to support satellite sensor calibration. The student set up and carried out lab calibration of miniature hyperspectral radiometer,
performed field hyperspectral measurements of different ground targets. The student also developed python modules for converting measurements to hyperseptral reflectance, data visualization and analysis. Figure 5 shows the field measurement activities during the project and the derived hyperspectral reflectance for different types of ground targets.
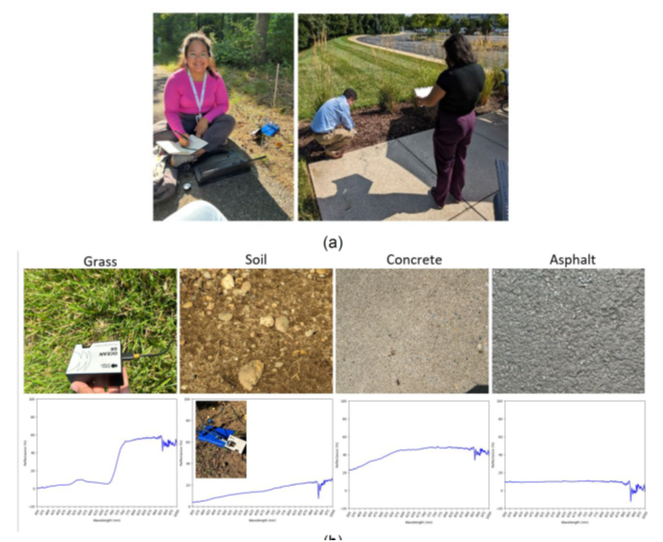
Figure 5: (a) Work with CISESS summer intern on the hyperspectral spectrometer calibration and ground reflectance measurement. (b) The calculated hyperspectral surface reflectance from field measurements for different surface types.
2.3 Ground-based Hyperspectral BRDF Measurements with the RHG-BRDF System
In August and September 2023, we focused on the development, integration, and testing of RGCVS in lab. Several field measurements to test the RHG-BRDF system were performed in October, 2023. These tests are functional performance tests over local barren land to ensure that the RHG-BRDF system functions as designed for different testing environments and addresses any issue or anomaly that may arise during the tests. Several issues were identified. One major issue was that the motor was not powerful enough so that the scanning motor for spectrometer experienced jitters during zenith angular scan. The motor driver was upgraded to address the scanning jitter problem. In November, 2023, the RHG-BRDF system reached the stage of standalone, portable and automated phase, ready for the full field test. Figure 6 shows the field experiment with RHG-BRDF system over grass and sand and calibration with reflectance reference board. The field experiment data for each test were collected in 3D data array of 2048 spectrum from 350 nm to 1000 nm, 17 scan angle (-80 to 80 degree with 10 degree spacing) and 36 azimuthal angles in 10 degree spacing. The data array and other auxiliary data were saved in hdf5 data for further analysis. Figure 7 shows the example hyperspectral radiometric data of reference board, sand and grass, and spectral reflectance for sand and grass derived from the hyperspectral measurements. Figure shows the further derived angular dependent BRDF over grass and sand at selected VIIRS M4, M5 and M6 bands from field measurements with RHG-BRDF System.

Figure 6: Field experiment with RHG-BRDF system over grass and sand scenes and calibration with reflectance reference board.
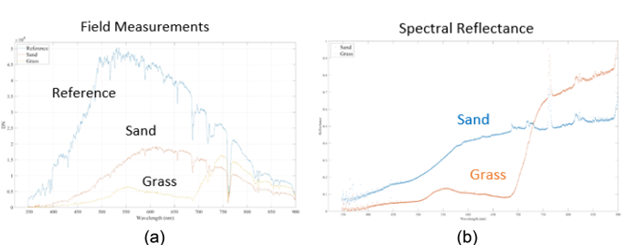
Figure 7: (a) Example hyperspectral measurements of reference board, sand and grass using RHG-BRDF system. (b) Spectral reflectance for sand and grass derived from hyperspectral measurements.
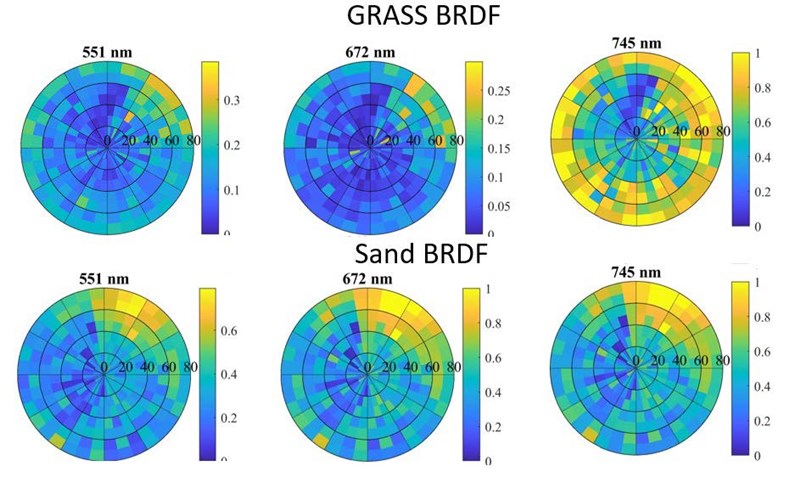
Figure 8: Derived grass and sand BRDF at selected VIIRS M4, M5 and M6 bands from field measurements with RHG-BRDF System.
3. Establishing collaboration with NOAA/STAR NCC Laboratory and Participated the Development of Portable DOAS (Differential Optical Absorption Spectroscopy) to support NOAA Atmospheric Composition Missions
There are initiatives at NOAA/STAR NCC Laboratory led by Dr. Changyong Cao on the development of portable DOAS to support NOAA Atmospheric Composition Missions. This initiative is under the vision that several new advanced satellite missions are emerging to monitor the atmospheric composition and air quality with hyperspectral capabilities in the ultraviolet to visible and shortwave infrared spectral range, including but not limited to, the TROPOMI, UVN, TEMPO, GEMS, Sentinel-4, GeoXO ACX, GOSAT, and EMIT, in addition to the OMPS onboard the Joint Polar Satellite System (JPSS). These hyperspectral sensors provide advanced capabilities to detect trace gasses and aerosols, and require advanced techniques for spectral and radiometric calibration. To expand the ground-based instrumentation in supporting NOAA atmospheric composition Missions, a portable DOAS system for ground air quality monitoring was developed at NOAA/STAR NCC Laboratory with the participation of ESSIC RSL. Figure 9 shows the integrated portable DOAS and its deployment during field measurements. This instrument provides ground-based methodology to support evaluation of atmospheric composition mission products. The instrument integrates Ocean Insight UV-VNIR hyperspectral spectrometer with angular scan control through Raspberry Pi. Python-based software enables control of portable DOAS, data acquisition and visualization. In addition, we developed capabilities to retrieve trace gas using the Q-DOAS based retrieval software for processing in-situ hyperspectral measurements at different elevation angles and retrieving trace gases such as NO2, SO2, O3, and O4. The portable DOAS will help establish the link between ground-based trace gas measurements and satellite observations.
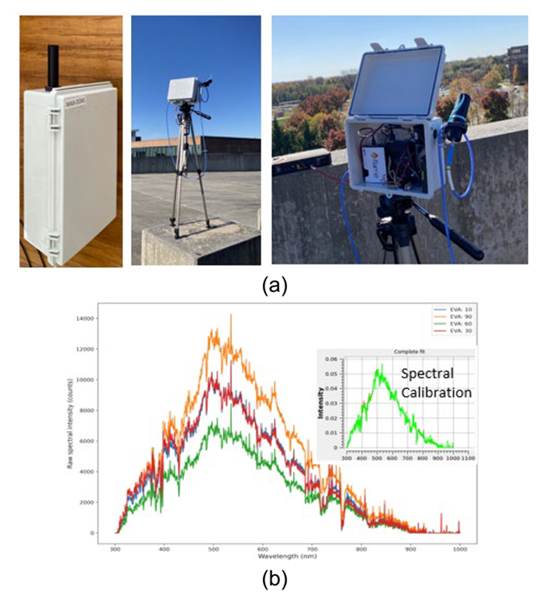
Figure 9: (a) The integrated portable DOAS and field measurements. (b) Measured scattered radiance at the different elevation angle and spectral calibration with reference solar irradiance model in Q-DOAS
Future work
1. Carry out field experiments with RHG-BRDF system and compare with satellite measurements.
2. Continue the collaboration with NOAA/STAR NCC laboratory on the development of portable DOAS and develop Q-DOAS based retrieval algorithm. Seek opportunity to participate in NASA Asia Air Quality field campaign.
3. Enhance modeling, simulation, and retrieval capabilities to support critical atmospheric composition missions
« Back